本プロジェクトの目標は、宇宙における長期居住を実現し、地球外に新たな生命圏を切り拓くことです。
これは人類の歴史においても大きなジャンプであり、我々の文明そのものに強い影響を与える可能性があります。
この計画で実現される宇宙居住システムは、月面における初期段階のベースキャンプとして機能することを目指しており、その後の恒久的な拠点の構築への道を拓きます。
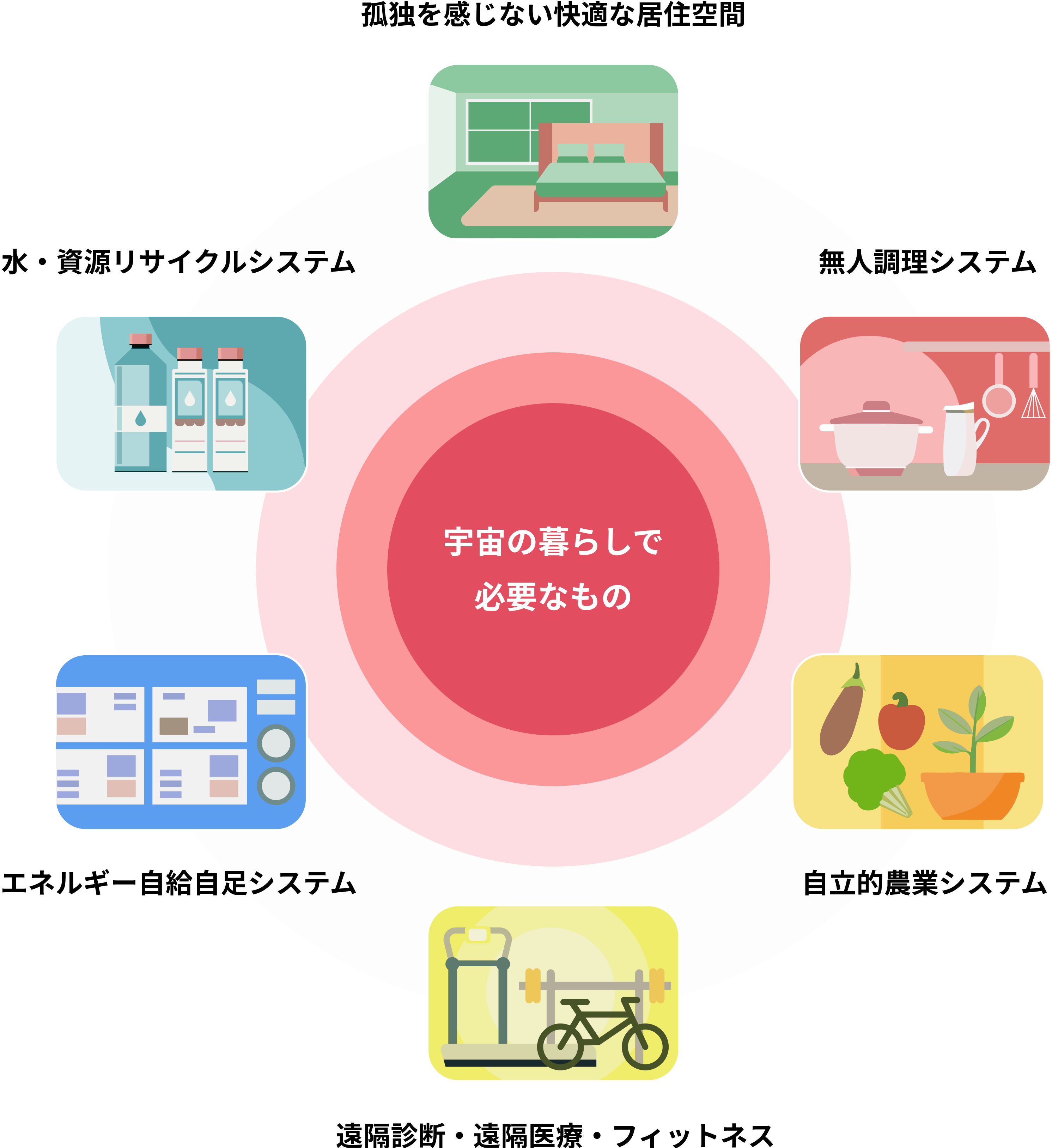
このプロジェクトの挑戦は、月や火星のような極限環境で人類が独立した生命圏を築くことです。
これを達成するため、AIロボット技術やスマート技術、そして将来には行動変容技術を活用し、2050年までに月面拠点構築のための技術を確立します。さらに、極限環境で活動可能な小型ロボットの開発、柔軟な構造体ロボットとの協調による高度な動作の実現も目指しています。

2040年までに月面での居住拠点を構築するための技術を確立し、それを活用して地上での社会実装にもつなげていく計画です。居住モジュールの地上での実証・評価を行う事で、人間が暮らすシステムとしてのさらなる改善を目指しています。このプロジェクトは、未来の宇宙探査と人類の居住可能性を大きく拡大する可能性を秘めています。